
The need to know how to effectively use tugs of various types to assist ships transiting a port at speed took on a greater urgency following several catastrophic tanker groundings involving large oil spills in the 1980s and 1990s. After these incidents, shipowners, ports and pilot associations began to work together to develop procedures to make the escorting of tankers more effective and implemented many escort systems around the world. In recent years, the LNG industry has continued to research this subject and has innovated several new escorting techniques and procedures.
The author, who coordinated many of the fully instrumented and other live tanker escort trials conducted in the United States and Canada since 1995, has carefully reviewed the data collected from these trials and identified several critical and interrelated factors associated with effectively escorting large vessels. These are:
• Transit speed, channel width and bottom type
The kinetic energy that needs to be controlled by the escort tugs to maintain the ship within the channel rises geometrically with the transit speed (KE=1/2W x V2). Minimizing the transit speed will significantly reduce this requirement. Of course, the ship’s pilot must balance the advantages of reducing the transit speed with the risks presented by environmental conditions that may be encountered (wind and currents) during the transit.
 |
|
Virginia Howe illustration |
|
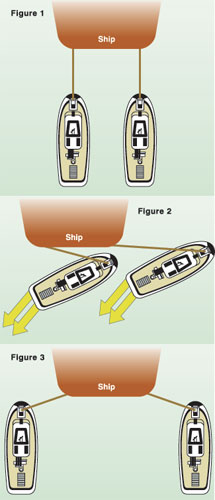
Figure 1, traditional placement of tandem tugs behind the ship, awaiting pilot to call for “powered indirect” maneuver, as shown in Figure 2. Figure 3, in T2D position, tugs run alongside with lines at a 70° angle, allowing a quicker response. |
The channel width is another factor that must be considered, as it, coupled with the transit speed, establishes how much time the pilot and the escort tug or tugs will have to save the ship in the event of an emergency.
Finally, the type of bottom of the channel should also be considered, as a rocky bottom might lead to a major casualty versus only an embarrassing one on a sandy bottom.
• Recognition/reaction time
The second critical element of an escort system is the amount of time it takes for the pilot to recognize that the ship has suffered a failure, decide (probably) to order the ship’s engine stopped and the tugs to work, and finally, for the ship’s engineers and tug operators to react and start the ordered action to save the ship. Until this preventive action is finally applied, the ship will continue to react to the failed rudder or, with a blackout, to the elements, and will be swinging at an accelerating turn rate out of the channel.
• Effective tug design
The third critical element of an effective system is to employ tugs that are capable of creating the steering and/or braking forces that the ship will require to avoid grounding at the designed transit speeds and anticipated R/R delays. It should be noted here that there are significant differences in escort performance capability in the many azimuthing stern drive (ASD) “tractor” tug designs in use today.
• Competency of the pilot and tug crews
The final critical element in escorting is the competency and level of training that the pilot and tug crews receive, either in a simulator or during live escort drills. Because of this factor, the author strongly urges ports to regularly conduct meaningful escort drills to ensure that the tugs can indeed meet the intended mission.
In tacking these challenges, the marine community has worked tirelessly in a number of areas to improve escort operations, including: redundant critical equipment on board ships, the escort performance of the tugs, the strength of the towlines, the capabilities of escort winches and the training of pilots and tug crews in sophisticated marine simulators. This article focuses on another area of escort tug performance that has also been improved over the past two decades, that of significantly improving the escorting procedures themselves.
In some escort systems around the world, they have employed very large tractors to control the ship, building tugs with up to 10,000 hp. Some of these tugs can produce towline forces of up to 250 tons. However, most commercial tankers are not designed with chock and bitt systems that can support these towline loads, in effect, negating the effectiveness of this solution. Further, in many ports a tug of this size would be very awkward for assisting smaller ships or when working in narrow slips.
One of the successful innovations implemented in the late ’90s to apply large tug forces to a ship in extremis was to tether two smaller ASDs or tractors (≈5,000 hp) at the transom of the ship being escorted. As the towline forces are additive, these boats (if properly designed and operated) working as a team can equal the escort performance of a 10,000-hp tractor. Further, as both of these tugs work at the transom, they both can take advantage of the longest lever arm possible to the ship’s pivot point. Finally, and not insignificant to this escorting issue, these two tugs apply their towing forces to separate fairlead and bollard systems on the ship, eliminating the safety problem of utilizing the high horsepower escort tug.
The term originally used to describe this technique was “tandem tractors,” now abbreviated to T2 (T squared).
Tandem Tractors, or T2
As originally developed, the two tugs trailed behind the ship (See Figure 1) until ordered to work by the pilot (See Figure 2). In the “powered indirect” maneuver, both tugs push their towlines up to almost a 90° angle to the ship’s centerline and apply the power requested by the pilot. The advantage of the maneuver is that working at a 90° angle, all of the towline forces created are now steering forces, which return the ship to its original heading as quickly as possible, thereby reducing the off-track error.
However, as good as this procedure is, it carries an inherent reaction delay of approximately 20 to 30 seconds because the tugs have to move from the position trailing behind the ship to the “powered indirect” (near 90°) position.
To address this time delay, Towing Solutions Inc. (TSI) developed a follow-on procedure to T2 called T Squared Deployed or T2D. The T2D maneuver seeks to minimize this response delay by having the two tugs pre-deployed, one to either side of the ship’s transom (See Figure 3). In this T2D position, the two tugs run parallel to the ship with their towlines lightly loaded, at a 70° angle to the ship’s centerline, ready to respond.
This pre-deployment allows one of the tractors to be in position to immediately roll into her towline and work at full power in the powered indirect mode, should an incident take place. Meanwhile, the pilot will have stopped the ship’s engine, to stop the water flow over the failed rudder, and ordered the second tug to cross over and assist the first tug to double the steering forces being applied to the ship.
The use of the T2D procedure removes potentially up to 20 seconds in the response of the first tug. The critical difference with this approach is that the ship barely begins to pick up a turn rate before the first tug is working at full power, which will, depending on the power of the boat, usually begin to reduce the turn rate or at least prevent it from accelerating. When the second tug arrives, the two tugs can then very rapidly return the ship to its original heading. With practice, and by talking to each other on their “house” radio channel, the tug captains ensure the boats’ safety while working in close proximity to each other.
To evaluate the effectiveness of this new procedure, the British Columbia Coast (BCC) Pilots have run two sets of live trials, one of which was fully instrumented. The instrumented trial involved the tanker Hellespont Tatina (displacing 96,935 metric tons at a draft of 43 feet) and two relatively small ASD tractors, Tiger Sun (60 metric tons bollard pull) and Falcon (40 metric tons bollard pull).
During the trials Hellespont Tatina was easily controlled by the two tugs addressing a hard-over rudder failure at 6 knots. For these trials the BCC pilots used a recognition/reaction delay of both 10 and 20 seconds for comparison purposes.
With the combination of a 6-knot transit speed and a 10-second recognition/reaction delay, the off-track distance for the ship averaged only 47 feet, despite the fact that the second tug never reached the desired 90° position. When a 20-second time delay was utilized for the ship traveling at the same speed, the average off-track distance increased to 109 feet, clearly illustrating the importance of the pilot working to minimize the recognition/reaction time. The escort system is now being employed to escort ships in Vancouver’s Second Narrows.
In the United States, the Lake Charles Pilots also conducted training exercises to evaluate this escort procedure on Q-Flex size LNG ships up to 216,000 cubic meters at 8 knots. The results of this training were very positive.
Conning the ship to a safe anchorage
This escort procedure yields an additional benefit as it addresses the fact that the chances of a ship suffering a serious mechanical problem in a favorable spot to anchor are remote. By taking advantage of the fact that the rudder has failed to one side, say to starboard, when the two tugs arrest the original swing of the ship to starboard, the pilot will allow the ship to swing back to port to regain her original track line. However, rather than run the tugs to the other side to arrest this swing, the pilot can simply come ahead on the ship’s engine and the failed rudder now works to stop the ship’s swing to port. By modulating the power of the two tugs (or the ship’s engine) the pilot can now very easily steer the ship to a safe anchorage and maintain a safe transit speed.
Both the BCC Pilots and the Lake Charles Pilots have experimented with this shiphandling technique, and have found that, with practice, they can control the ship very easily and proceed to a safe anchorage. Obviously, each pilot would have to assess the most appropriate course of action to take, depending on the prevailing conditions at the time, but the new T2D steering method gives the pilot another option to consider.
The development of the T2D procedure has shown that pilots and tug crews can be provided with new tools to control a ship suffering a mechanical failure during a port transit. It also illustrates that there is much more to learn about escorting and escort tug operations.
Author’s note: For those mariners not familiar with the powered indirect procedure, we have conducted tests with standard Voiths at speeds up to 10 knots and the boat outperformed the Voith “Butterfly” predictions for this boat with no safety concerns. Similarly, ASDs of the Robert Allan Z-Tech and AZT family have also performed extremely well at speeds up to and exceeding 10 knots. However, the author wishes to caution all pilots and tug crews serving on other ASD designs that not all ASDs are capable of reaching the 90° operating position and some do not have the stability to attempt this at higher speeds. The author strongly recommends that before employing an ASD in this fashion that they be carefully tested for stability and capability by practicing with the boats first at a modest speeds (5-6 knots) and then carefully working up to a safe upper limit.
——————
Capt. Gregory Brooks, the principal of Towing Solutions Inc, has been active in the towing industry for 45 years. In addition to his expertise in escorting procedures and escort tug technology, he is regularly engaged in marine simulation research and training.